携手戴育 共创辉煌
多年专注教育装备研发与生产
全国咨询热线
18916464525
18916464525
携手戴育 共创辉煌
多年专注教育装备研发与生产

如果您对我们的文章螺栓联接静动态综合教学实验台,四轴机械手控制实验装置有任何疑问,请及时联系我们,我们会为您解答阅读时产生的问题,并且如果您看了螺栓联接静动态综合教学实验台,四轴机械手控制实验装置后,也有兴趣投稿,我们也将为您提供像本文螺栓联接静动态综合教学实验台,四轴机械手控制实验装置一样的机会,将您的投稿上传到我们的平台上。
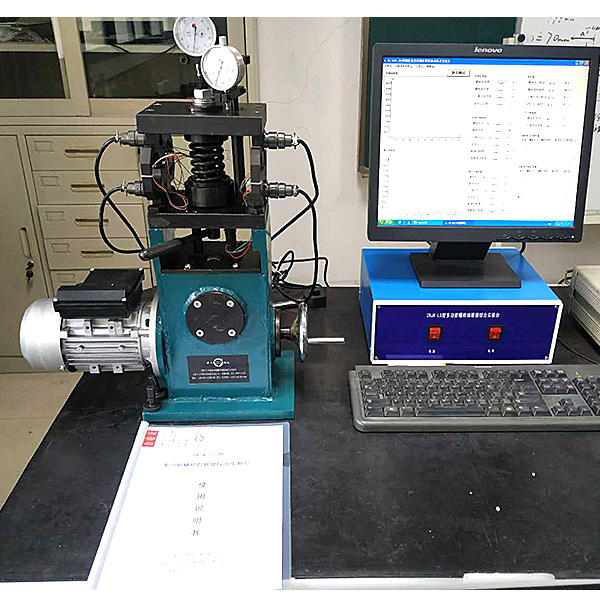
螺栓联接静动态综合教学实验台,四轴机械手控制实验装置
一、功能及特点:
螺栓组联接实验装置能进行螺栓静动态受力、变形、刚度、轴向载荷、预紧拉力等实验.
专用测试分析软件能对螺栓静动态进行相关的检测,并能对比实测和仿真曲线,曲线可打印。
所有被测试元件采用全桥测试电路,各应变测试结构稳定、重复性好、精度高。
采用单相交流电机(220V电源),方便启动电机进行静动态螺栓实验。
专用测试分析软件具有多媒体教学功能,学生可通过软件中的实验说明自主进行实验,并通过软件进行试验报告的编辑。
二、实验目的
1、了解螺栓联接在拧紧过程中各部分的受力情况。
2、计算螺栓相对刚度,并绘制螺栓联接的受力变形图。
3、验证受轴向工作载荷时,预紧螺栓联接的变形规律,及对螺栓总拉力的影响。
4、通过螺栓的动载实验,改变螺栓联接的相对刚度,观察螺栓变应力幅值的变化,以验证提高螺栓联接强度的各项措施。
三、实验项目
1、基本螺栓联接静动态实验。
2、增加螺栓刚度的静动态实验。
3、增加被连接件刚度的静动态实验。
4、改用弹性垫片的静动态实验。
螺栓联接静动态综合教学实验台,四轴机械手控制实验装置
概述
四自由度机械手实训模型为三维定位系统的微缩,使用可编程控制器控制,在X、Y、Z轴三个方向上准确地驱动步进电动机进行物品搬运、移动的成品,完善的执行机构可实现现代物流系统中全部动作过程。配套三菱FX1N-40MT 。
实训装置由铝合金导轨式实训台、机械手装置、控制系统等组成。实训装置为坐标式机械手,可完成机械手旋转、手臂垂直上下、手臂水平移动,手爪旋转四个自由度的位置精确控制。同时配置晶体管式PLC可编程控制器,用于对整个机械手进行复杂地位置控制。该实训装置的控制部分均采用标准式模块设计,可分为电源模块、PLC模块、系统控制模块。包含了专业中所涉及的诸如步进电机驱动、机械传动、气动、可编程控制器、、等多项技术,给学生提供了一个综合实训环境,使学生学过的诸多单科专业知识在这里得到全面认识、综合训练和相互提升。
技术参数
电源:单相AC220V、50Hz
功率:<200W
尺寸:不小于600*400*500mm
设备结构:
实训装置台架为金属结构,实训考核装置PLC模块的I/O 端子、各常用模块与PLC的连接端子,均与安全插座连接,使用带安全插头的导线进行电路连接;各指令开关、光电开关、传感器和指示元件的电路,则通过端子排进行连接。插拔线连接电路与端子连接电路相结合,既保证学生基本技能的训练、形成和巩固,又保证电路连接的快速、安全和可靠。
1、手动/自动控制模式,针对硬件检测及程序校验。
2、开放的执行机构,可根据不同的控制方案编程,构成不同的执行系统,适应不同层次的人员进行PLC学习和编程。也可作为课题设计或研究使用。
3、产品为开放式,整体机械构造清晰可见。
4、安全保护措施:实训台桌面采用高绝缘、高强度、耐高温的高密度板。具有接地保护、漏电保护功能,安全性符合相关的国标标准。采用高绝缘的安全型插座及带绝缘护套的高强度安全型实验导线。
5、机械手的横轴和竖轴的机械传动采用高精密的滚珠丝杆,高精密的光杆导轨和直线轴承,配以先进地机械设计、精密的机械加工及装配,可使机械手臂非常平稳地进行垂直和水平移动和水平方向旋转及精确位置控制。
6、采用选进的步进电机作为横轴和竖轴的动力源,可实现0.028度的细分,即每转一圈需要12800步,滚珠丝行程为4mm,则手臂每步位移精度为0.0003125mm,步进电机的正常单步角度为0.9,则手臂每步位移精度为0.01mm。
螺栓联接静动态综合教学实验台,四轴机械手控制实验装置是我们的原创,请尊重我们的劳动,不要随意转发,如果您要对螺栓联接静动态综合教学实验台,四轴机械手控制实验装置进行转发,请注明螺栓联接静动态综合教学实验台,四轴机械手控制实验装置是来自戴育教仪厂。


戴育教仪厂移动站
地 址:上海市松江区九亭镇(上海久富经济开发区) 潮富路118号 联系电话:18916464525 邮箱:859961374@qq.com
Copyright © 2006 上海戴育科教仪器设备有限公司 All Rights Reserved 备案号:沪ICP备19005175号
![]()











